2025
-
Gao, K., Chen, J., and Rahimi, S. (2025).
AI Regulation in the US: Lessons from Commodity Futures Legislative Journey and a Perspective CFTC-NFA Model for AI
11th IEEE International Conference on Sustainable Technology and Engineering (i-COSTE), Virginia, USA, 2 - 4 December, 2025
[bibtex]
@inproceedings{gao2025ai,
title={AI Regulation in the US: Lessons from Commodity Futures Legislative Journey and a Perspective CFTC-NFA Model for AI},
author={Gao, Di Kevin and Chen, Jingdao and Rahimi, Shahram},
booktitle={2025 International Conference on Sustainable Technology and Engineering (i-COSTE)},
pages={1--8},
year={2025},
organization={IEEE}
}
-
Trovinger, M., Giacobbe, L., Grantham, T., Sun, C., Chen, J. (2025).
Reinforcement Learning with Vision-based State Estimation for Generalized Robotic Assembly
Proceedings of the 42nd International Symposium on Automation and Robotics in Construction (ISARC), Montreal, Canada, July 28-31
[bibtex]
@inproceedings{trovinger2025,
year = 2025,
month = {July},
author = {Trovinger, Mark and Giacobbe, Leonel and Grantham, Tanner and Sun, Chuangchuang and Chen, Jingdao},
title = {Reinforcement Learning with Vision-based State Estimation for Generalized Robotic Assembly},
booktitle = {Proceedings of the 42nd International Symposium on Automation and Robotics in Construction},
isbn = {978-0-6458322-2-8},
issn = {2413-5844},
publisher = {International Association for Automation and Robotics in Construction (IAARC)},
editor = {Zhang, Jiansong and Chen, Qian and Lee, Gaang and Gonzalez-Moret, Vicente and Kamat, Vineet},
pages = {179-186},
address = {Montreal, Canada}
}
-
Yu, J., Jayakumar, M., Chen, Y., Cho, Y., and Chen, J. (2025).
Self-supervised Learning with LiDAR-Camera Fusion for Construction Site Traversability Estimation
Proceedings of the ASCE 2025 International Conference on Computing in Civil Engineering (i3CE), New Orleans, LA, USA, May 11-14
[bibtex]
@inproceedings{yu2025,
author = {Jinhee Yu and Monika Jayakumar and Yilong Chen and Yong Cho and Jingdao Chen },
title = {Self-Supervised Learning with LiDAR-Camera Fusion for Construction Site Traversability Estimation},
booktitle = {International Conference on Computing in Civil Engineering},
year={2025},
pages = {582-590},
doi = {10.1061/9780784486443.064},
URL = {https://ascelibrary.org/doi/abs/10.1061/9780784486443.064},
}
-
Rugg, J., Kim, S., Cho, Y., and Chen, J. (2025).
Segment Anything Model for Point Cloud Temporal Change Detection on Construction Sites
Proceedings of the ASCE 2025 International Conference on Computing in Civil Engineering (i3CE), New Orleans, LA, USA, May 11-14
[bibtex]
@inproceedings{rugg2025,
author = {Jeffrey Rugg and Seongyong Kim and Yong Cho and Jingdao Chen },
title = {Segment Anything Model for Point Cloud Temporal Change Detection on Construction Sites},
booktitle = {International Conference on Computing in Civil Engineering},
year={2025},
pages = {670-679},
doi = {10.1061/9780784486436.071},
URL = {https://ascelibrary.org/doi/abs/10.1061/9780784486436.071},
}
2024
-
Fernandez, I., Neupane, S., Chakraborty, T., Mitra, S., Mittal, S., Pillai, N., Chen, J., and Rahimi, S. (2024).
A Survey on Privacy Attacks Against Digital Twin Systems in AI-Robotics
2024 IEEE 10th International Conference on Collaboration and Internet Computing (CIC), Washington, District of Columbia, United States, 28 - 30 October 2024
[bibtex]
@inproceedings{fernandez2024survey,
title={A survey on privacy attacks against digital twin systems in AI-robotics},
author={Fernandez, Ivan A and Neupane, Subash and Chakraborty, Trisha and Mitra, Shaswata and Mittal, Sudip and Pillai, Nisha and Chen, Jingdao and Rahimi, Shahram},
booktitle={2024 IEEE 10th International Conference on Collaboration and Internet Computing (CIC)},
pages={70--79},
year={2024},
organization={IEEE}
}
-
Gao, K., Mittal, S., Wu, J., Du, H., Chen, J., and Rahimi, S. (2024).
The AI Pentad, the CHARME2D Model, and an Assessment of Current-State AI Regulation
10th IEEE International Conference on Sustainable Technology and Engineering (i-COSTE), Perth, Australia, 18th - 20th December, 2024
[bibtex]
@INPROCEEDINGS{gao2024,
author={Gao, Di Kevin and Mittal, Sudip and Wu, Jiming and Du, Hongwei and Chen, Jingdao and Rahimi, Shahram},
booktitle={2024 International Conference on Sustainable Technology and Engineering (i-COSTE)},
title={The AI Pentad, the CHARME2D Model, and an Assessment of Current-State AI Regulation},
year={2024},
pages={1-8},
}
-
Yu, J., Saha, S., Jayakumar, M., Gugssa, M., Chen, J., and Wang, J. (2024).
LiDAR-based Traversability Estimation for Ground Robots on Construction Sites using Self-Supervised Learning
Proceedings of the ASCE 2024 International Conference on Computing in Civil Engineering (i3CE), Pittsburgh, PA, USA, July 28-31
[bibtex]
@inproceedings{yu2024,
author = {Jinhee Yu and Swayamjit Saha and Monika Jayakumar and Mikias Gugssa and Jingdao Chen and Jun Wang },
title = {LiDAR-Based Traversability Estimation for Ground Robots on Construction Sites Using Self-Supervised Learning},
booktitle = {International Conference on Computing in Civil Engineering},
year={2024},
pages = {803-812},
doi = {10.1061/9780784486115.085},
URL = {https://ascelibrary.org/doi/abs/10.1061/9780784486115.085},
}
-
Rugg, J., Chen, J., Gugssa, M., and Wang, J. (2024).
Object-level Temporal Change Detection on Construction Sites with 3D Deep Learning Models
Proceedings of the ASCE 2024 International Conference on Computing in Civil Engineering (i3CE), Pittsburgh, PA, USA, July 28-31
[bibtex]
@inproceedings{rugg2024,
author = {Jeffrey Rugg and Jingdao Chen and Mikias Gugssa and Jun Wang },
title = {Object-Level Temporal Change Detection on Construction Sites with 3D Deep Learning Models},
booktitle = {International Conference on Computing in Civil Engineering},
year = {2024},
pages = {565-573},
doi = {10.1061/9780784486122.063},
URL = {https://ascelibrary.org/doi/abs/10.1061/9780784486122.063},
}
-
Chang, S., Chen, J., and Park, J. (2024).
Review of Metaverse Technologies to Broaden Accessibility in Civil and Construction Engineering Education
ASCE Construction Research Congress (CRC) 2024, March 20-23, Des Moines, IA.
[bibtex]
@inbook{chang2024,
author = {Soowon Chang and Jingdao Chen and Jisoo Park },
title = {Review of Metaverse Technologies to Broaden Accessibility in Civil and Construction Engineering Education},
booktitle = {Construction Research Congress 2024},
chapter = {},
pages = {304-314},
doi = {10.1061/9780784485293.031},
URL = {https://ascelibrary.org/doi/abs/10.1061/9780784485293.031},
}
2023
-
Gao, K., Haverly, A., Mittal, S., and Chen, J. (2023).
A bibliometric view of AI Ethics development
2023 IEEE Asia-Pacific Conference on Computer Science and Data Engineering (CSDE), Yanuca Island, Fiji, Dec 4-6,
[bibtex]
@INPROCEEDINGS{gao2023,
author={Gao, Kevin Di and Haverly, Andrew and Mittal, Sudip and Chen, Jingdao},
booktitle={2023 IEEE Asia-Pacific Conference on Computer Science and Data Engineering (CSDE)},
title={A Bibliometric View of AI Ethics Development},
year={2023},
volume={},
number={},
pages={1-5},
doi={10.1109/CSDE59766.2023.10487710},
}
-
Garshabi, A., Wang, J., Chen, J., and Ma, J. (2023).
Human-Robot Collaboration in the Construction Industry: A Mini-review
2023 IEEE International Conference on Robotics and Automation (ICRA) Workshop on Future of Construction, London, U.K., June 2,
[bibtex]
@inproceedings{garshasbi2023,
doi = {10.22260/ICRA2023/0003},
year = 2023,
month = {July},
author = {Garshasbi, Ali and Wang, Jun and Chen, Jingdao and Ma, Junfeng},
title = {Human-Robot Collaboration in the Construction Industry: A Mini-review},
booktitle = {Proceedings of the 2nd Future of Construction Workshop at the International Conference on Robotics and Automation (ICRA 2023)},
isbn = {-},
issn = {2413-5844},
publisher = {International Association for Automation and Robotics in Construction (IAARC)},
editor = {Chen, Jingdao (Mississippi State University) and Cho, Yong K. (Georgia Institute of Technology) and Jeong, Inbae (North Dakota State University) and Feng, Chen (New York University) and Zhang, Liangjun (Baidu Research) and Fallon, Maurice (University of Oxford) and Morin, Kristian (HILTI) and Nair, Ashish-Devadas (HILTI)},
pages = {1-4},
address = {London, UK},
}
-
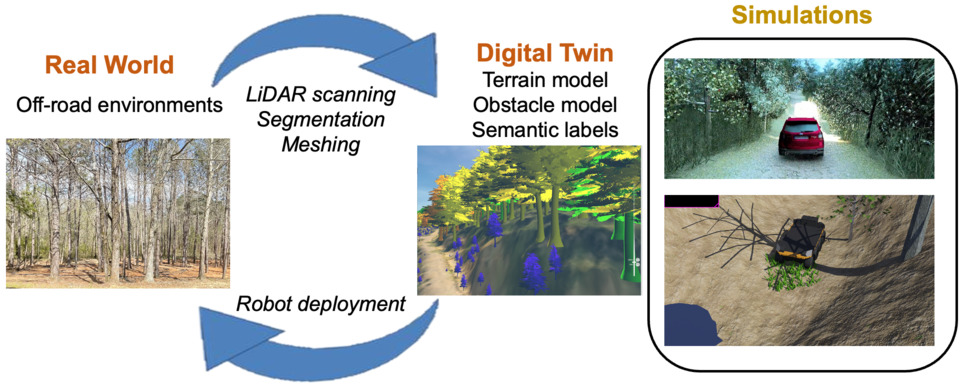
Chen, J., Gugssa, M., Yee, J., Wang, J., Goodin, C., and Ram Das, A. (2023).
Framework for digital twin creation in off-road environments from LiDAR scans
Proc. SPIE 12529, Synthetic Data for Artificial Intelligence and Machine Learning: Tools, Techniques, and Applications, 125290F (13 June 2023)
[code]
[bibtex]
@inproceedings{chen2023spie,
author = {Jingdao Chen and Mikias Gugssa and Justin Yee and Jun Wang and Christopher Goodin and Athish Ram Das},
title = {{Framework for digital twin creation in off-road environments from LiDAR scans}},
volume = {12529},
booktitle = {Synthetic Data for Artificial Intelligence and Machine Learning: Tools, Techniques, and Applications},
editor = {Christopher L. Howell and Kimberly E. Manser and Raghuveer M. Rao},
organization = {International Society for Optics and Photonics},
publisher = {SPIE},
pages = {125290F},
keywords = {LiDAR, Off-road, Digital twin, Point cloud, Simulator},
year = {2023},
doi = {10.1117/12.2663632},
URL = {https://doi.org/10.1117/12.2663632},
}
-
Yu, J., Chen, J., Dabbiru, L., and Goodin, C. (2023).
Analysis of LiDAR configurations on off-road semantic segmentation performance
Proc. SPIE 12540, Autonomous Systems: Sensors, Processing, and Security for Ground, Air, Sea, and Space Vehicles and Infrastructure 2023, 1254003 (13 June 2023)
[code]
[bibtex]
@inproceedings{yu2023spie,
author = {Jinhee Yu and Jingdao Chen and Lalitha Dabbiru and Christopher T. Goodin},
title = {{Analysis of LiDAR configurations on off-road semantic segmentation performance}},
volume = {12540},
booktitle = {Autonomous Systems: Sensors, Processing, and Security for Ground, Air, Sea, and Space Vehicles and Infrastructure 2023},
editor = {Michael C. Dudzik and Stephen M. Jameson and Theresa J. Axenson},
organization = {International Society for Optics and Photonics},
publisher = {SPIE},
pages = {1254003},
keywords = {LiDAR , autonomous vehicles, semantic segmentation},
year = {2023},
doi = {10.1117/12.2663098},
URL = {https://doi.org/10.1117/12.2663098},
}
-
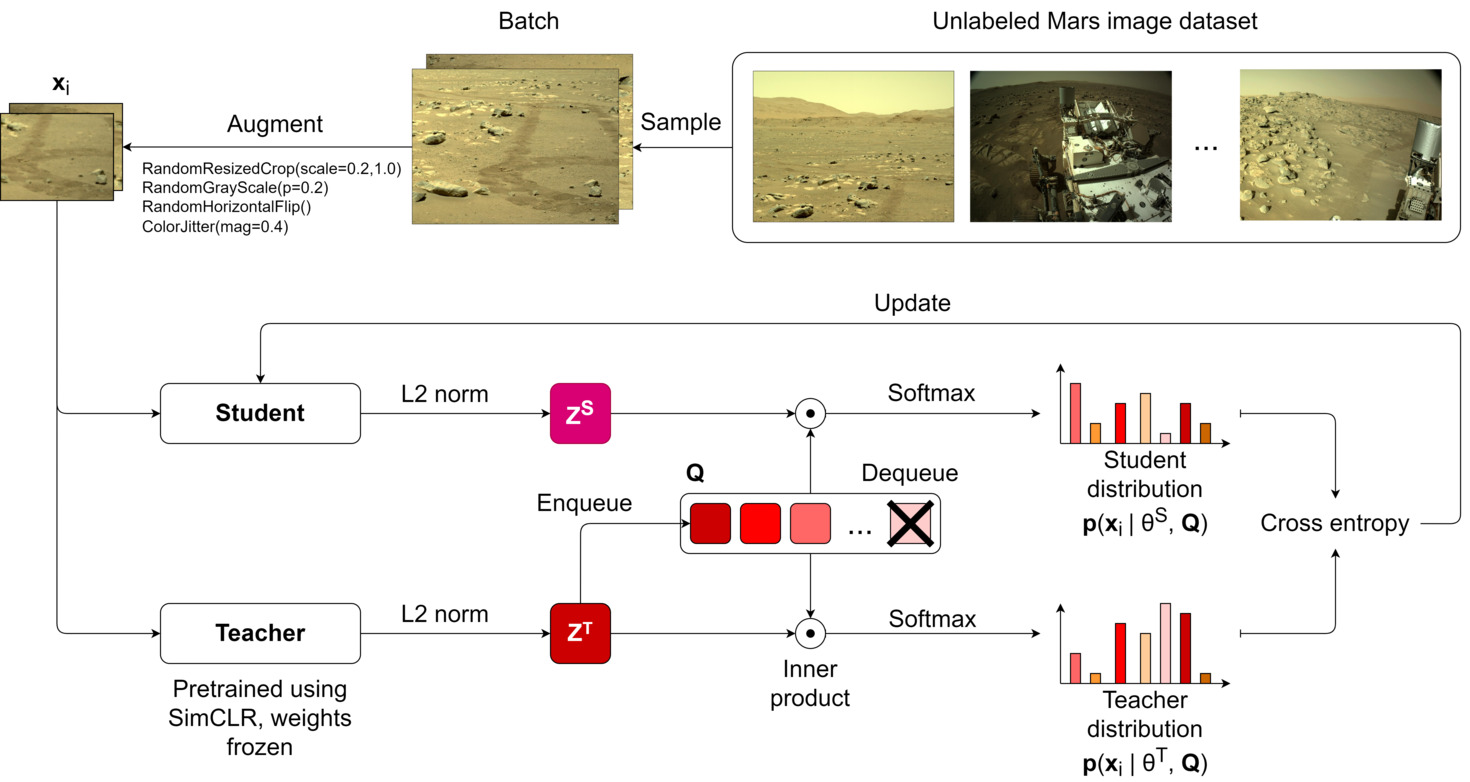
Goh, E., Ward, I. R., Vincent, G., Pak, K., Chen, J., and Wilson, B. (2023).
Self-supervised Distillation for Computer Vision Onboard Planetary Robots
IEEE Aerospace Conference, Big Sky, MT, USA, March 4-11
[code]
[bibtex]
@INPROCEEDINGS{goh2023,
author={Goh, Edwin and Ward, Isaac R. and Vincent, Grace and Pak, Kai and Chen, Jingdao and Wilson, Brian},
booktitle={2023 IEEE Aerospace Conference},
title={Self-supervised Distillation for Computer Vision Onboard Planetary Robots},
year={2023},
volume={},
number={},
pages={1-11},
doi={10.1109/AERO55745.2023.10115598},
}
2022
-
Ward, I. R., Moore, C., Pak, K., Chen, J., and Goh, E. (2022).
Improving Contrastive Learning on Visually Homogeneous Mars Rover Images
European Conference on Computer Vision (ECCV) Workshop on AI4Space, Tel Aviv, Israel, Oct 23
[bibtex]
@InProceedings{ward2022,
author="Ward, Isaac Ronald and Moore, Charles and Pak, Kai and Chen, Jingdao and Goh, Edwin",
editor="Karlinsky, Leonid and Michaeli, Tomer and Nishino, Ko",
title="Improving Contrastive Learning on Visually Homogeneous Mars Rover Images",
booktitle="Computer Vision -- ECCV 2022 Workshops",
year="2023",
publisher="Springer Nature Switzerland",
address="Cham",
pages="170--185",
isbn="978-3-031-25056-9",
}
-
Vincent, G., Yepremyan, A., Chen, J., and Goh, E. (2022).
Mixed-Domain Training Improves Multi-Mission Terrain Segmentation
European Conference on Computer Vision (ECCV) Workshop on AI4Space, Tel Aviv, Israel, Oct 23
[bibtex]
@InProceedings{vincent2022,
author="Vincent, Grace and Yepremyan, Alice and Chen, Jingdao and Goh, Edwin",
editor="Karlinsky, Leonid and Michaeli, Tomer and Nishino, Ko",
title="Mixed-Domain Training Improves Multi-mission Terrain Segmentation",
booktitle="Computer Vision -- ECCV 2022 Workshops",
year="2023",
publisher="Springer Nature Switzerland",
address="Cham",
pages="96--111",
isbn="978-3-031-25056-9",
}
-
Kim, S., Yajima, Y., Park, J., Chen, J., and Cho,Y. (2022).
A Hybrid Semantic-Geometric Approach for Clutter-Resistant Floorplan Generation from Building Point Clouds.
Proceedings of the 9th International Conference on Construction Engineering and Project Management (ICCEPM), Las Vegas, NV, USA, June 20-23
[code]
[bibtex]
@INPROCEEDINGS{kim2022iccepm,
author={Kim, Seongyong and Yajima, Yosuke and Park, Jisoo and Chen, Jingdao and Cho, Yong},
booktitle={2022 International Conference on Construction Engineering and Project Management (ICCEPM)},
title={A Hybrid Semantic-Geometric Approach for Clutter-Resistant Floorplan Generation from Building Point Clouds},
year={2022},
pages={792-799},
}
-
Goh, E., Chen, J., and Wilson, B. (2022).
Mars Terrain Segmentation with Less Labels.
IEEE Aerospace Conference, Big Sky, MT, USA, March 5-12
[bibtex]
@INPROCEEDINGS{goh2022,
author={Goh, Edwin and Chen, Jingdao and Wilson, Brian},
booktitle={2022 IEEE Aerospace Conference (AERO)},
title={Mars Terrain Segmentation with Less Labels},
year={2022},
pages={1-10},
doi={10.1109/AERO53065.2022.9843245},
}
2021
-
Yajima, Y., Kim, S., Chen, J., and Cho,Y. (2021).
Fast Online Incremental Segmentation of 3D Point Clouds from Disaster Sites.
Proceedings of the 38th International Symposium on Automation and Robotics in Construction (ISARC), Dubai, UAE, November 2-5
[bibtex]
@inproceedings{yajima2021isarc,
doi = {10.22260/ISARC2021/0048},
year = 2021,
month = {November},
author = {Yajima, Yosuke and Kim, Seongyong and Chen, Jing Dao and Cho, Yong},
title = {Fast Online Incremental Segmentation of 3D Point Clouds from Disaster Sites},
booktitle = {Proceedings of the 38th International Symposium on Automation and Robotics in Construction (ISARC)},
isbn = {978-952-69524-1-3},
issn = {2413-5844},
publisher = {International Association for Automation and Robotics in Construction (IAARC)},
pages = {341-348},
address = {Dubai, UAE},
}
-
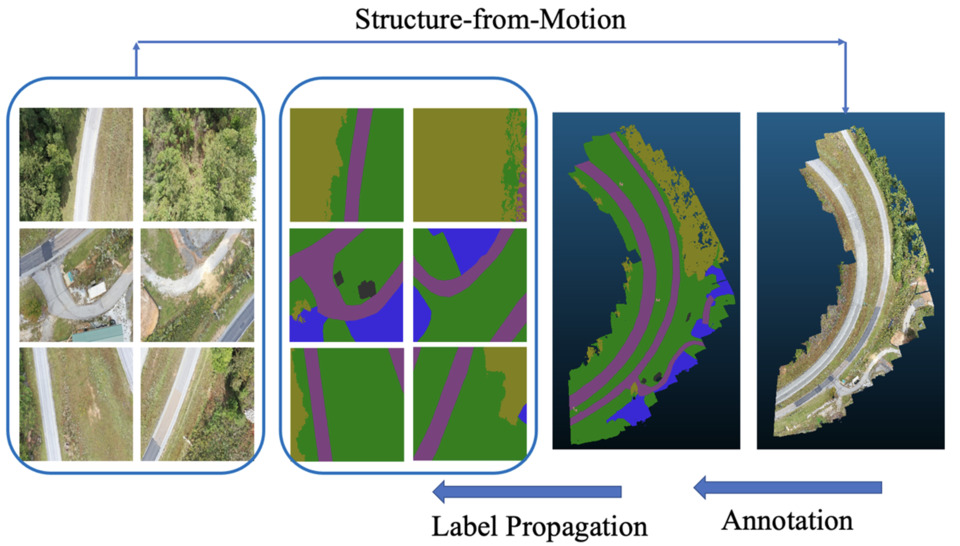
Kahoush, M., Yajima, Y., Kim, S., Chen, J., Park, J., Kangisser, S., Irizarry, J., and Cho,Y. (2021).
Analysis of Flight Parameters on UAV Semantic Segmentation Performance for Highway Infrastructure Monitoring.
Proceedings of the ASCE 2021 International Conference on Computing in Civil Engineering (i3CE), Orlando, FL, USA, September 12-14
[bibtex]
@inproceedings{kahoush2021i3ce,
author = {Mark Kahoush and Yosuke Yajima and Seongyong Kim and Jingdao Chen and Jisoo Park and Steven Kangisser and Javier Irizarry and Yong K. Cho },
title = {Analysis of Flight Parameters on UAV Semantic Segmentation Performance for Highway Infrastructure Monitoring},
booktitle = {International Conference on Computing in Civil Engineering 2021},
year = 2021,
pages = {885-893},
doi = {10.1061/9780784483893.109},
URL = {https://ascelibrary.org/doi/abs/10.1061/9780784483893.109},
}
-
Yajima, Y., Kahoush, M., Kim, S., Chen, J., Park, J., Kangisser, S., Irizarry, J., and Cho,Y. (2021).
AI-driven 3D Point Cloud-Based Highway Infrastructure Monitoring System using UAV.
Proceedings of the ASCE 2021 International Conference on Computing in Civil Engineering (i3CE), Orlando, FL, USA, September 12-14
[bibtex]
@inproceedings{yajima2021i3ce,
author = {Yosuke Yajima and Mark Kahoush and Seongyong Kim and Jingdao Chen and Jisoo Park and Steven Kangisser and Javier Irizarry and Yong K. Cho },
title = {AI-Driven 3D Point Cloud-Based Highway Infrastructure Monitoring System Using UAV},
booktitle = {International Conference on Computing in Civil Engineering 2021},
year = 2021,
pages = {894-901},
doi = {10.1061/9780784483893.110},
URL = {https://ascelibrary.org/doi/abs/10.1061/9780784483893.110},
}
2020
-
Chen, J., Kim, P., Sun, D.I., Han, C.S., Ahn, Y.H., Ueda, J. and Cho, Y. (2020).
Workspace Modeling: Visualization and Pose Estimation of Teleoperated Construction Equipment from Point Clouds.
Proceedings of the 37th International Symposium on Automation and Robotics in Construction (ISARC), Kitakyshu, Japan, October 27-28
[bibtex]
@INPROCEEDINGS{chen2020isarc,
author={Jingdao Chen and Pileun Kim and Dong-Ik Sun and Chang-Soo Han and Yong-Han Ahn and Jun Ueda and Yong K. Cho},
booktitle={37th International Symposium on Automation and Robotics in Construction (ISARC)},
title={Workspace Modeling: Visualization and Pose Estimation of Teleoperated Construction Equipment from Point Clouds},
year={2020},
month={October},
pages={781-788},
}
-
Price, L., Chen, J., and Cho, Y. (2020).
Dynamic Crane Workspace Update for Collision Avoidance during Blind Lift Operations.
Proceedings of the 18th International Conference on Computing in Civil and Building Engineering, ICCCBE, pp. 959-970, São Paulo, Brazil
[bibtex]
@InProceedings{price2020,
author="Price, Leon C. and Chen, Jingdao and Cho, Yong K.",
editor="Toledo Santos, Eduardo and Scheer, Sergio",
title="Dynamic Crane Workspace Update for Collision Avoidance During Blind Lift Operations",
booktitle="Proceedings of the 18th International Conference on Computing in Civil and Building Engineering",
year="2020",
publisher="Springer International Publishing",
address="Cham",
pages="959--970",
isbn="978-3-030-51295-8",
}
-
Chen, J., and Cho, Y. (2020).
Unsupervised Crack Segmentation from Disaster Site Point Clouds using Point Feature Clustering.
Proceedings of Workshop of the European Group for Intelligent Computing in Engineering, EG-ICE, pp. 125-133, Berlin, Germany
[bibtex]
@inproceedings {chen2020egice,
author = {Chen, Jingdao and Cho, Yong},
editor = {Ungureanu, Lucian Constantin AND Hartmann, Timo},
title = {Unsupervised Crack Segmentation from Disaster Site Point Clouds using Point Feature Clustering},
booktitle = {EG-ICE 2020 Workshop on Intelligent Computing in Engineering},
year = {2020},
publisher = {Universitätsverlag der TU Berlin},
address = {Berlin},
doi = {10.14279/depositonce-9977},
url = {http://dx.doi.org/10.14279/depositonce-9977},
pages = {125-133},
}
-
Park, J., Chen, J., and Cho Y. (2020).
Point Cloud Information Modeling (PCIM): an Innovative Framework for as-is Information Modeling of Construction Sites
ASCE Construction Research Congress (CRC) 2020, March 9-10, Tempe, AZ.
[bibtex]
@inproceedings{park2020crc,
author = {Jisoo Park and Jingdao Chen and Yong K. Cho },
title = {Point Cloud Information Modeling (PCIM): an Innovative Framework for as-is Information Modeling of Construction Sites},
booktitle = {Construction Research Congress 2020},
year = {2020},
}
2019
-
Chen, J., and Cho Y. (2019).
Exemplar-based Building Element Retrieval from Point Clouds
International Conference on Smart Infrastructure and Construction (ICSIC), Churchill College, Cambridge, UK, July 8-9.
[bibtex]
@inproceedings{chen2019icsic,
author = {Jingdao Chen and Yong Cho},
title = {Exemplar-Based Building Element Retrieval from Point Clouds},
booktitle = {International Conference on Smart Infrastructure and Construction 2019 (ICSIC)},
year = "2019",
pages = {225-231},
doi = {10.1680/icsic.64669.225},
URL = {https://www.icevirtuallibrary.com/doi/abs/10.1680/icsic.64669.225},
}
-
Chen, J. and Cho, Y. (2019).
Detection of Damaged Infrastructure on Disaster Sites using Mobile Robots.
IEEE 2019 16th International Conference on Ubiquitous Robots (UR), Jeju, Korea, June 24-27
[bibtex]
@INPROCEEDINGS{chen2019ur,
author={J. {Chen} and Y. K. {Cho}},
booktitle={2019 16th International Conference on Ubiquitous Robots (UR)},
title={Detection of Damaged Infrastructure on Disaster Sites using Mobile Robots},
year={2019},
pages={648-653},
}
-
Chen, J., Kim, K.N., Cho,Y., Lee, J., Kim, B., Ahn, Y., and Kang, J. (2019).
Nuclear Power Plant Disaster Site Simulation using Rigid Body Physics.
Proceedings of the ASCE 2019 International Conference on Computing in Civil Engineering (i3CE), Atlanta, GA, USA, June 17-19, DOI:10.1061/9780784482421.069
[bibtex]
@inproceedings{chen2019i3ce,
author = {Jingdao Chen and Kinam Kim and Yong K. Cho and Joo Sung Lee and Byeol Kim and Yong Han Ahn and Junsuk Kang },
title = {Nuclear Power Plant Disaster Site Simulation Using Rigid Body Physics},
booktitle = {International Conference on Computing in Civil Engineering 2019},
year={2019},
pages = {546-552},
doi = {10.1061/9780784482421.069},
URL = {https://ascelibrary.org/doi/abs/10.1061/9780784482421.069},
}
-
Kim, K.N., Chen, J., and Cho, Y. (2019).
Evaluation of Machine Learning Algorithms for Worker's Motion Recognition using Motion Sensors.
Proceedings of the ASCE 2019 International Conference on Computing in Civil Engineering (i3CE), Atlanta, GA, USA, June 17-19, DOI:10.1061/9780784482438.007
[bibtex]
@inproceedings{kim2019i3ce,
author = {Kinam Kim and Jingdao Chen and Yong K. Cho },
title = {Evaluation of Machine Learning Algorithms for Worker's Motion Recognition Using Motion Sensors},
booktitle = {International Conference on Computing in Civil Engineering 2019},
year={2019},
pages = {51-58},
doi = {10.1061/9780784482438.007},
URL = {https://ascelibrary.org/doi/abs/10.1061/9780784482438.007},
}
2018
-
Chen, J., Kim, P., Cho, Y., and Ueda, J. (2018).
Object-sensitive potential fields for mobile robot navigation and mapping in indoor environments.
Proceedings of the 2018 IEEE 15th International Conference on Ubiquitous Robots (UR), Honolulu, HI, USA, June 26-30, 10.1109/URAI.2018.8441896
[bibtex]
@INPROCEEDINGS{chen2018ur,
author={J. {Chen} and P. {Kim} and Y. K. {Cho} and J. {Ueda}},
booktitle={2018 15th International Conference on Ubiquitous Robots (UR)},
title={Object-sensitive potential fields for mobile robot navigation and mapping in indoor environments},
year={2018},
pages={328-333},
doi={10.1109/URAI.2018.8441896},
month={June},
}
-
Chen, J., Cho, Y., and Ueda, J. (2018).
Sampled-Point Network for Classification of Deformed Building Element Point Clouds.
Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), BrisBane, Australia, May 21-25, 10.1109/ICRA.2018.8461095
[code]
[bibtex]
@INPROCEEDINGS{chen2018icra,
author={J. {Chen} and Y. K. {Cho} and J. {Ueda}},
booktitle={2018 IEEE International Conference on Robotics and Automation (ICRA)},
title={Sampled-Point Network for Classification of Deformed Building Element Point Clouds},
year={2018},
pages={2164-2169},
}
-
Fang, Y., Chen, J., Cho, Y., Zhang, S., and Perez, E. (2018).
Enhance Blind Lift Safety by Real-Time Sensing and Visualization.
Proceedings of the 18th International Conference on Construction Applications of Virtual Reality (CONVR2018), Auckland, New Zealand, Nov 22-23
[bibtex]
@INPROCEEDINGS{fang2018convr,
author={Yihai Fang and Jingdao Chen and Yong Cho and Sijie Zhang and Esau Perez},
booktitle={18th International Conference on Construction Applications of Virtual Reality (CONVR)},
title={Enhance Blind Lift Safety by Real-Time Sensing and Visualization},
year={2018},
month={November},
}
-
Kim, P., Chen, J., Kim, J., and Cho, Y. (2018).
SLAM-Driven Intelligent Autonomous Mobile Robot Navigation for Construction Applications.
Proceedings of Workshop of the European Group for Intelligent Computing in Engineering, EG-ICE,. pp. 254-269, Lausanne, Switzerland, DOI: 10.1007/978-3-319-91635-4_14
[bibtex]
@InProceedings{kim2018egice,
author="Kim, Pileun and Chen, Jingdao and Kim, Jitae and Cho, Yong K.",
editor="Smith, Ian F. C. and Domer, Bernd",
title="SLAM-Driven Intelligent Autonomous Mobile Robot Navigation for Construction Applications",
booktitle="Advanced Computing Strategies for Engineering",
year="2018",
publisher="Springer International Publishing",
pages="254--269",
}
-
Chen, J. and Cho, Y. (2018).
Point-to-point Comparison Method for Automated Scan-vs-BIM Deviation Detection.
Proceedings of 17th International Conference on Computing in Civil and Building Engineering, Tampere, Finland, June 4-7.
[bibtex]
@INPROCEEDINGS{chen2018icccbe,
author={Jingdao Chen and Yong Cho},
booktitle={17th International Conference on Computing in Civil and Building Engineering},
title={Point-to-point Comparison Method for Automated Scan-vs-BIM Deviation Detection},
year={2018},
month={June},
}
-
Kim, P., Chen, J., Cho, Y. (2018).
Autonomous Mobile Robot Localization and Mapping for Unknown Construction Environments.
ASCE Construction Research Congress (CRC) 2018, pp.147-156, April 2-4, New Orleans, LA, DOI: 10.1061/9780784481264.015
[bibtex]
@inproceedings{kim2018crc,
author = {Pileun Kim and Jingdao Chen and Yong K. Cho },
title = {Autonomous Mobile Robot Localization and Mapping for Unknown Construction Environments},
booktitle = {Construction Research Congress 2018},
year = {2018},
pages = {147-156},
doi = {10.1061/9780784481264.015},
URL = {https://ascelibrary.org/doi/abs/10.1061/9780784481264.015},
}
-
Chen, J., Cho, Y., and Kim, K. (2018).
Region Proposal Mechanism for Building Element Recognition for Advanced Scan-to-BIM Process.
ASCE Construction Research Congress 2018,April2-4, New Orleans, LA, Doi: 10.1061/9780784481264.022
[bibtex]
@inproceedings{chen2018crc,
author = {Jingdao Chen and Yong K. Cho and Kyungki Kim },
title = {Region Proposal Mechanism for Building Element Recognition for Advanced Scan-to-BIM Process},
booktitle = {Construction Research Congress 2018},
year = {2018},
pages = {221-231},
doi = {10.1061/9780784481264.022},
URL = {https://ascelibrary.org/doi/abs/10.1061/9780784481264.022},
}
2017
-
Kim, P., Chen, J., and Cho, Y. (2017).
Building element recognition with thermal-mapped point clouds.
Proceedings of the 34th International Symposium on Automation and Robotics in Construction (ISARC), Taipei, Taiwan, June 28-July 1, DOI: 10.22260/ISARC2017/0122
[bibtex]
@INPROCEEDINGS{kim2017isarc,
author={Pileun Kim and Jingdao Chen and Yong Cho},
booktitle={34th International Symposium on Automation and Robotics in Construction (ISARC)},
title={Building element recognition with thermal-mapped point clouds},
year={2017},
month={June},
}
-
Chen, J., Fang, Y., and Cho, Y. (2017).
Mobile Asset Tracking for Dynamic 3D Crane Workspace Generation in Real Time.
Proceedings of the 2017 International Workshop on Computing for Civil Engineering (IWCCE), Seattle, WA, USA, June 25-27, DOI: 10.1061/9780784480830.016
[bibtex]
@inproceedings{chen2017crane,
author = {Jingdao Chen and Yihai Fang and Yong K. Cho },
title = {Mobile Asset Tracking for Dynamic 3D Crane Workspace Generation in Real Time},
booktitle = {International Workshop on Computing in Civil Engineering 2017},
year = {2017},
pages = {122-129},
doi = {10.1061/9780784480830.016},
URL = {https://ascelibrary.org/doi/abs/10.1061/9780784480830.016},
}
-
Chen, J., Fang, Y., and Cho, Y. (2017).
Unsupervised Recognition of Volumetric Structural Components from Building Point Clouds.
Proceedings of the 2017 International Workshop on Computing for Civil Engineering (IWCCE), Seattle, WA, USA, June 25-27, DOI: 10.1061/9780784480823.005
[bibtex]
@inproceedings{chen2017iwcce,
author = {Jingdao Chen and Yihai Fang and Yong K. Cho },
title = {Unsupervised Recognition of Volumetric Structural Components from Building Point Clouds},
booktitle = {International Workshop on Computing in Civil Engineering 2017},
year = {2017},
pages = {34-42},
doi = {10.1061/9780784480823.005},
URL = {https://ascelibrary.org/doi/abs/10.1061/9780784480823.005},
}
2016
-
Kim, P., Cho, Y., and Chen, J. (2016).
Automatic Registration of Laser Scanned Color Point Clouds Based on Common Feature Extraction.
16th International Conference on Construction Applications of Virtual Reality (CONVR), Hong Kong, Dec. 11-13
[bibtex]
@INPROCEEDINGS{chen2016convr,
author={Pileun Kim and Yong Cho and Jingdao Chen},
booktitle={16th International Conference on Construction Applications of Virtual Reality (CONVR)},
title={Automatic Registration of Laser Scanned Color Point Clouds Based on Common Feature Extraction},
year={2016},
month={December},
}
-
Chen, J., Fang, Y., and Cho, Y. (2016).
Automated Equipment Recognition and Classification from Scattered Point Clouds for Construction Management.
International Symposium on Automation and Robotics in Construction (ISARC), Auburn, AL, July 18-21, 2016, DOI: 10.22260/ISARC2016/0027
[bibtex]
@INPROCEEDINGS{chen2016isarc,
author={Jingdao Chen and Yihai Fang and Yong Cho},
booktitle={33rd International Symposium on Automation and Robotics in Construction (ISARC)},
title={Automated Equipment Recognition and Classification from Scattered Point Clouds for Construction Management},
year={2016},
month={July},
}
-
Chen, J. and Cho, Y. (2016).
Real-time 3D Mobile Mapping for the Built Environment
. International Symposium on Automation and Robotics in Construction (ISARC), Auburn, AL, July 18-21, 2016, DOI: 10.22260/ISARC2016/0028
[bibtex]
@INPROCEEDINGS{chen2016slam,
author={Jingdao Chen and Yong Cho},
booktitle={33rd International Symposium on Automation and Robotics in Construction (ISARC)},
title={Real-time 3D Mobile Mapping for the Built Environment},
year={2016},
month={July},
}
-
Fang, Y., Chen, J., Cho, Y., and Zhang, P. (2016).
A Point Cloud-Vision Hybrid Approach for 3D Location Tracking of Mobile Construction Assets.
International Symposium on Automation and Robotics in Construction (ISARC), Auburn, AL, July 18-21, 2016, DOI: 10.22260/ISARC2016/0074
[bibtex]
@INPROCEEDINGS{fang2016isarc,
author={Yihai Fang and Jingdao Chen and Yong Cho and Peiyao Zhang},
booktitle={33rd International Symposium on Automation and Robotics in Construction (ISARC)},
title={A Point Cloud-Vision Hybrid Approach for 3D Location Tracking of Mobile Construction Assets},
year={2016},
month={July},
}
-
Kim, P., Cho, Y. Chen, J. (2016).
Target-Free Automatic Registration of Point Clouds.
International Symposium on Automation and Robotics in Construction (ISARC), Auburn, AL, July 18-21, 2016, DOI: 10.22260/ISARC2016/0083
[bibtex]
@INPROCEEDINGS{kim2016isarc,
author={Pileun Kim and Yong Cho and Jingdao},
booktitle={33rd International Symposium on Automation and Robotics in Construction (ISARC)},
title={Target-Free Automatic Registration of Point Clouds},
year={2016},
month={July},
}